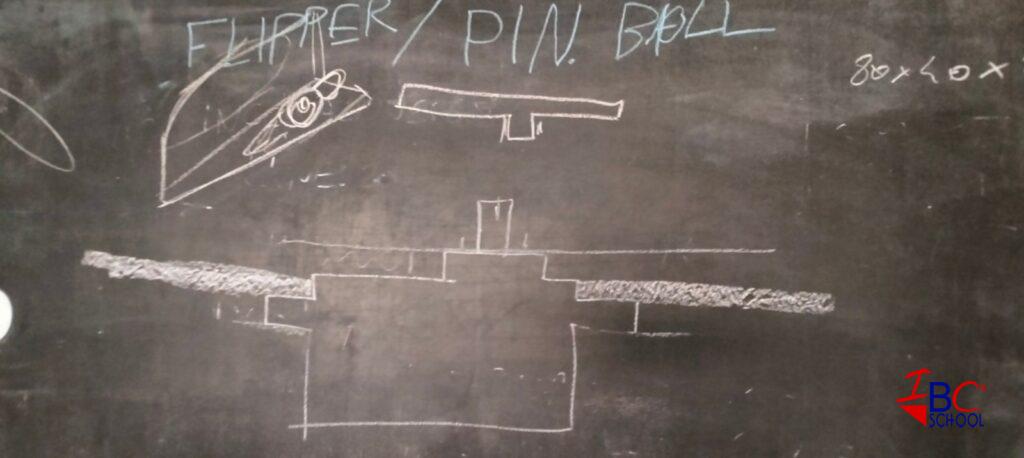
KittyBall:Bit – il flipper (pinball)
Le classi 4° e 5°primaria, durante le ore di robotica e meccatronica, hanno deciso di realizzare un flipper e non il solito robot o rover!
Il Flipper (pinball) è un gioco di abilità; molto diffuso a partire dagli anni cinquanta, soprattutto in bar e locali pubblici. Tra le caratteristiche curiose: la pallina è di metallo pieno, ha un diametro di 30mm e pesa 90 grammi !



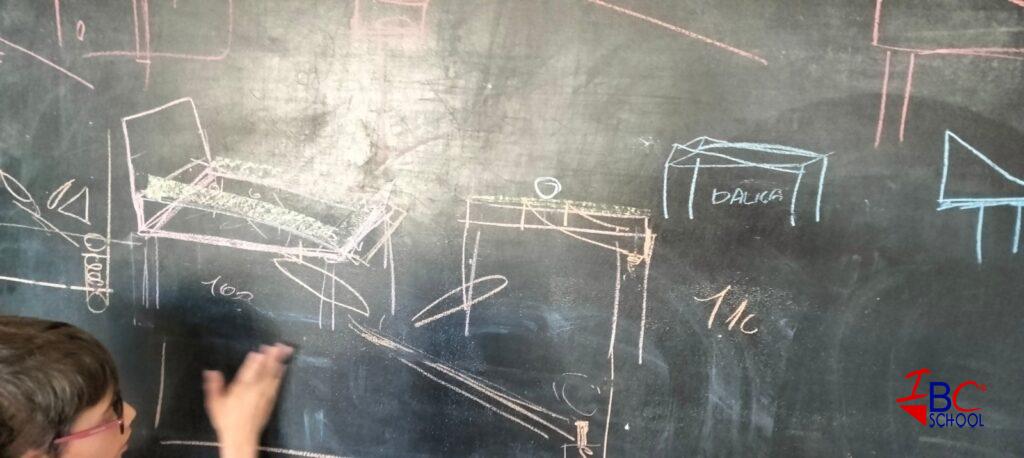
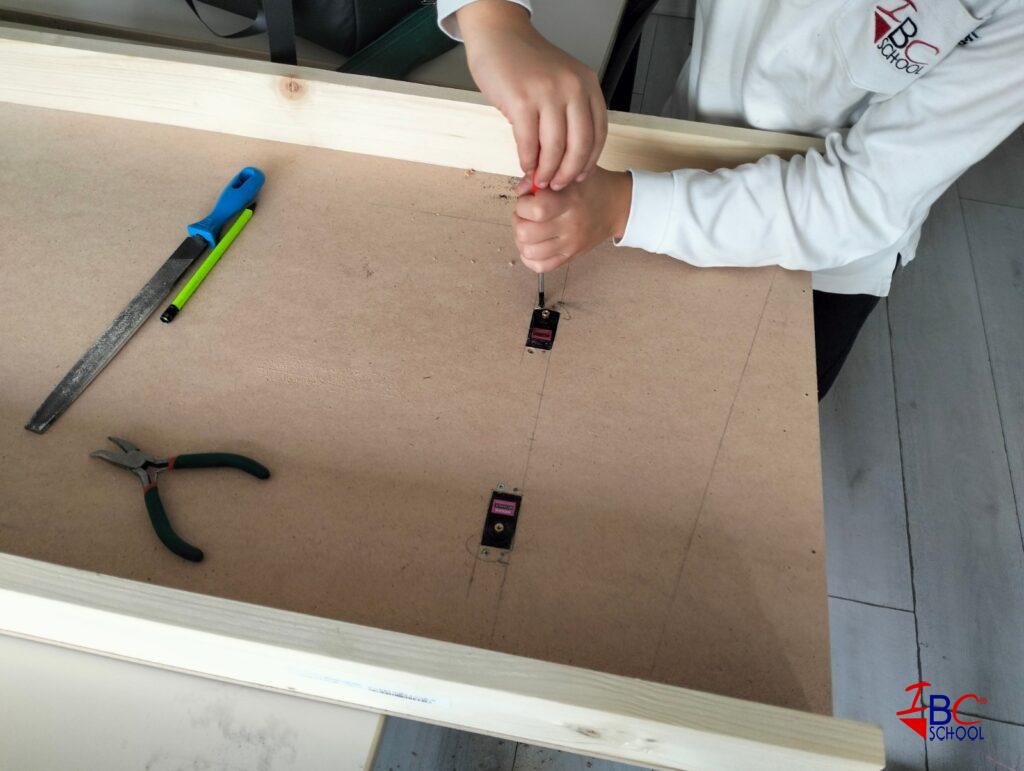
La difficoltà principale è stata realizzare le parti meccaniche: dalla costruzione della base in legno al montaggio dei componenti. I bambini hanno tagliato, saldato, dipinto, incollato e assemblato!
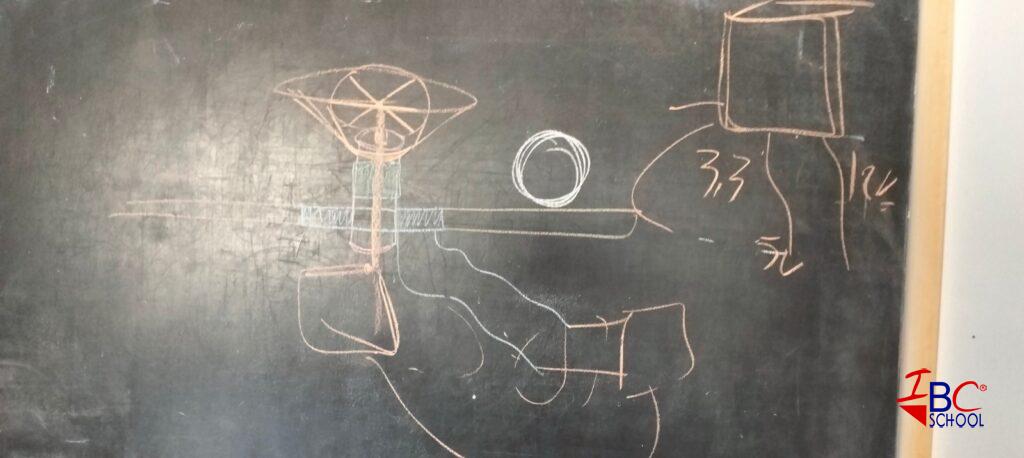
Abbiamo impiegato circa 6 mesi per realizzarlo, di cui un mese intero di progettazione!
Godetevi il video dei nostri ragazzi!
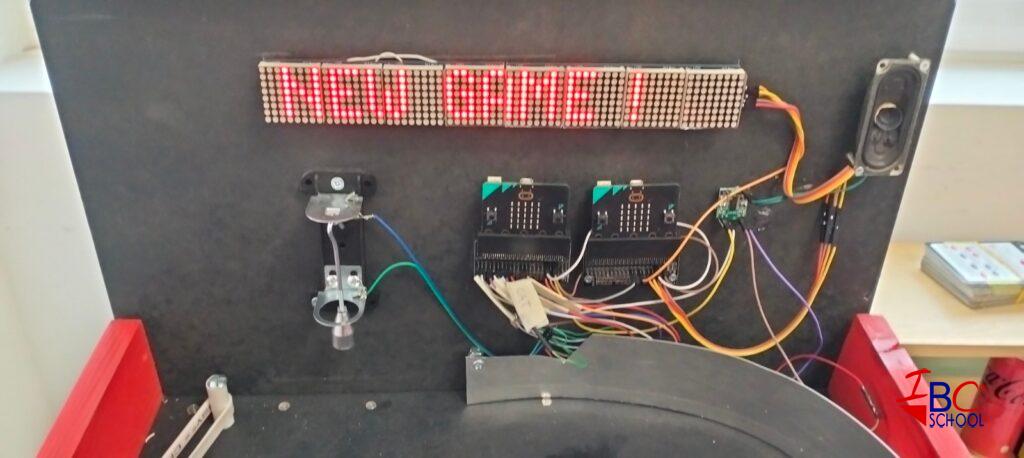
Il KittyBall:bit è stato realizzato con il controller Micro:Bit.
Il telaio realizzato in legno, un vecchio alimentatore da PC per farlo funzionare, braccialetti di gomma riciclati per creare i respingitori.
I bersagli sono dei micro pulsanti montati in vecchi portachiavi trasparenti di plexiglass.




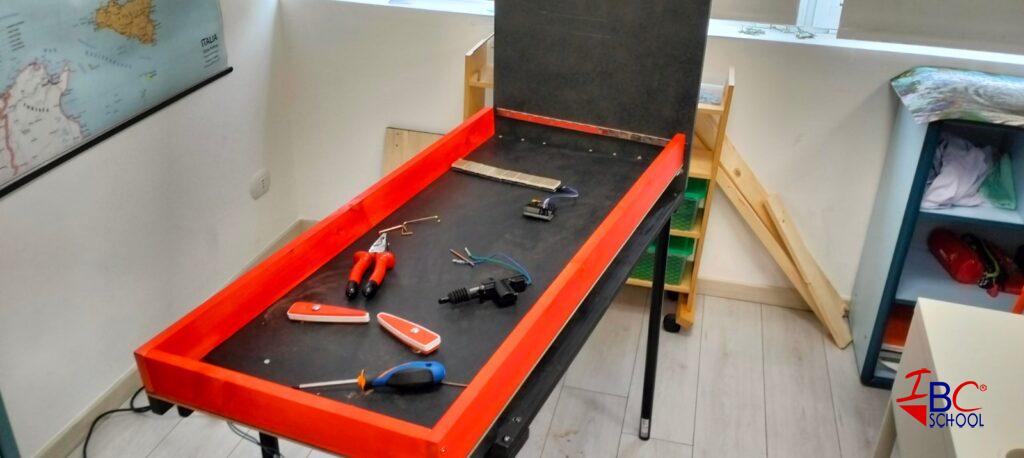




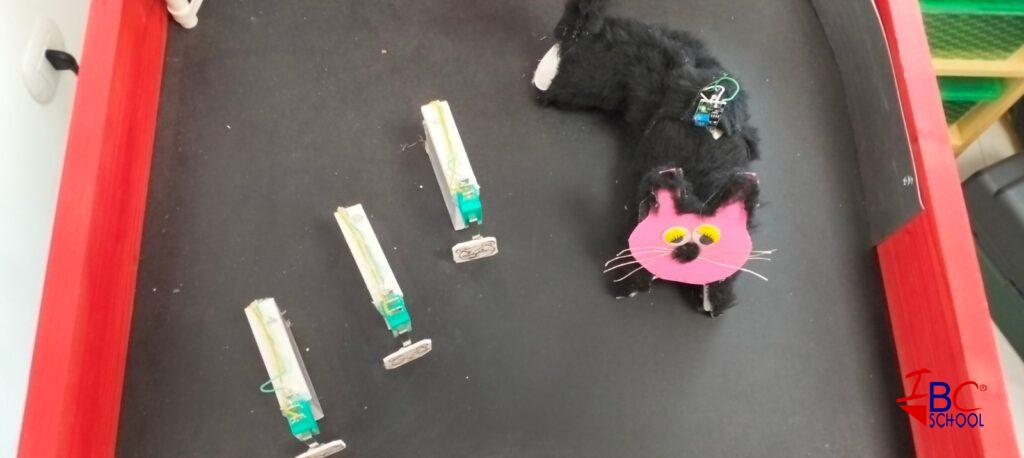
Nel progetto originale era stato pensato di utilizzare dei motori servo per muovere le PIN ma il tentativo è miseramente naufragato. I servo-motori sono molto forti e spostano molto peso, ma sono lenti.
Abbiamo, quindi, utilizzato i motori generalmente utilizzati nelle auto per le chiusure centralizzate, molto forti e molto veloci.